Point tracking
Step-by-step tutorial on how to integrate custom point tracking neural network into Supervisely platform on the example of PIPs.
Last updated
Was this helpful?
Step-by-step tutorial on how to integrate custom point tracking neural network into Supervisely platform on the example of PIPs.
Last updated
Was this helpful?
In this tutorial you will learn how to integrate your custom point tracking model into Supervisely by creating two simple serving apps. First, we will construct a straightforward model that only moves the original point as an illustration. The SOTA model , which already has the majority of the necessary functions implemented, will be used in the second part.
To integrate your model, you need to subclass sly.nn.inference.PointTracking and implement 2 methods:
load_on_device method for downloading the weights and initializing the model on a specific device. Takes a model_dir argument, which is a directory for all model files (like configs, weights, etc). The second argument is a device - a torch.device like cuda:0, cpu.
predict. The core implementation of model inference. It takes a list of images of np.ndarray type, inference settings and point to track as arguments, applies the model inference to the images and returns a list of predictions (both input point and predicted points are sly.nn.PredictionPoint objects).
Currently, integrating models that can track several points simultaneously is not possible due to the implementation of the sly.nn.inference.PointTracking class.
The overall structure of the class we will implement is looking like this:
The superclass has a serve() method. For running the code on the Supervisely platform, m.serve() method should be executed:
And here is the beauty comes in. The method serve() internally handles everything and deploys your model as a REST API service on the Supervisely platform. It means that other applications are able to communicate with your model and get predictions from it.
So let's implement the class.
Defining imports and global variables
1. load_on_device
The following code creates the model according to config model_settings.yaml. Path to .yaml config is passed during initialization. This settings can also be given as a python dictionary. Config in the form of a dictionary becomes available in self.custom_inference_settings_dict attribute. Also load_on_device will keep the model as a self.model for further use:
Our settings.yaml file:
2. predict
The core method for model inference. Here we will use the defined model and make sure that predicted points are not outside of the bounds.
It must return exactly a list of sly.nn.PredictionPoint objects for compatibility with Supervisely. Notice, that the first frame is not in the list.
Usage of our class
Once the class is created, here we initialize it and get one test prediction for debugging.
Here are the output predictions of our simple model:
Let's now implement the class for pre-trained model. The majority of the code used to load and run the model is taken directly from the original repository.
It's feasible to run the present model on the CPU, thus installing CUDA requirements is not required.
Step 3. Load model weights.
Step 4. Open the repository directory in Visual Studio Code.
Step 5. Run debug for script src/main.py
The integration script is simple:
Initialize model.
Runs inference on a demo images.
Predictions adds and new frames saves in chronological order.
Defining imports and global variables
1. load_on_device
The following code creates the model according to config supervisely/serve/model_settings.yaml. Path to .yaml config is passed during initialization. The saverloader.load function provided by the creator of the original repository loads the model state dict from model_dir. Also load_on_device will keep the model as a self.model and the device as self.device for further use:
2. predict
The core method for model inference. Here we are preparing images and getting an inference of the model. The function sly_functions.run_model is borrowed from the original repository. However, there are a few changes that can be made to improve quality: preserve the aspect ratio, apply padding before resizing and make sure that predicted points are not outside of the bounds. Then we wrap model predictions into sly.nn.PredictionPoint.
It must return exactly a list of sly.nn.PredictionPoint objects for compatibility with Supervisely.
Usage of our class
Once the class is created, here we initialize it and get one test prediction for debugging.
Here are the output predictions of our PIPs model:
The beauty of this class is that you can easily debug your code locally in your favorite IDE.
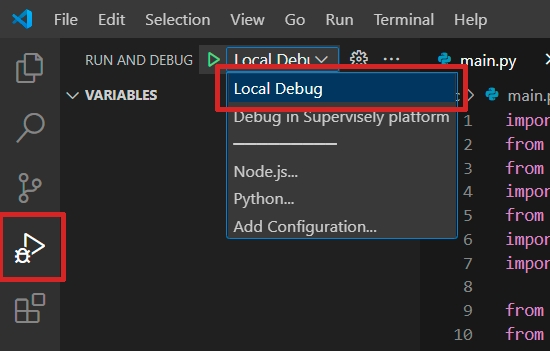
You can run the code locally for debugging. For Visual Studio Code we've created a launch.json config file that can be selected:
Once the code seems working locally, it's time to test the code right in the Supervisely platform as a debugging app. For that:
If you develop in a Docker container, you should run the container with --cap_add=NET_ADMIN option.
Install sudo apt-get install wireguard iproute2.
Define your TEAM_ID in the local.env file. Actually there are other env variables that is needed, but they are already provided in ./vscode/launch.json for you.
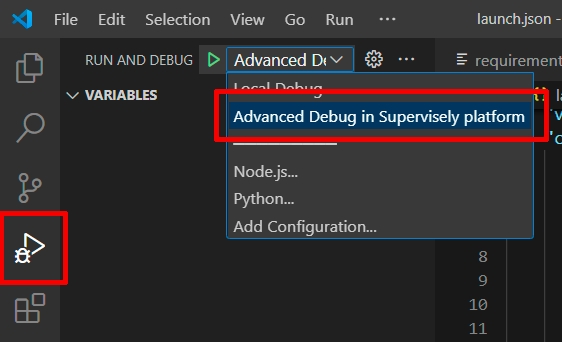
Switch the launch.json config to the Advanced debug in Supervisely platform:
Run the code.
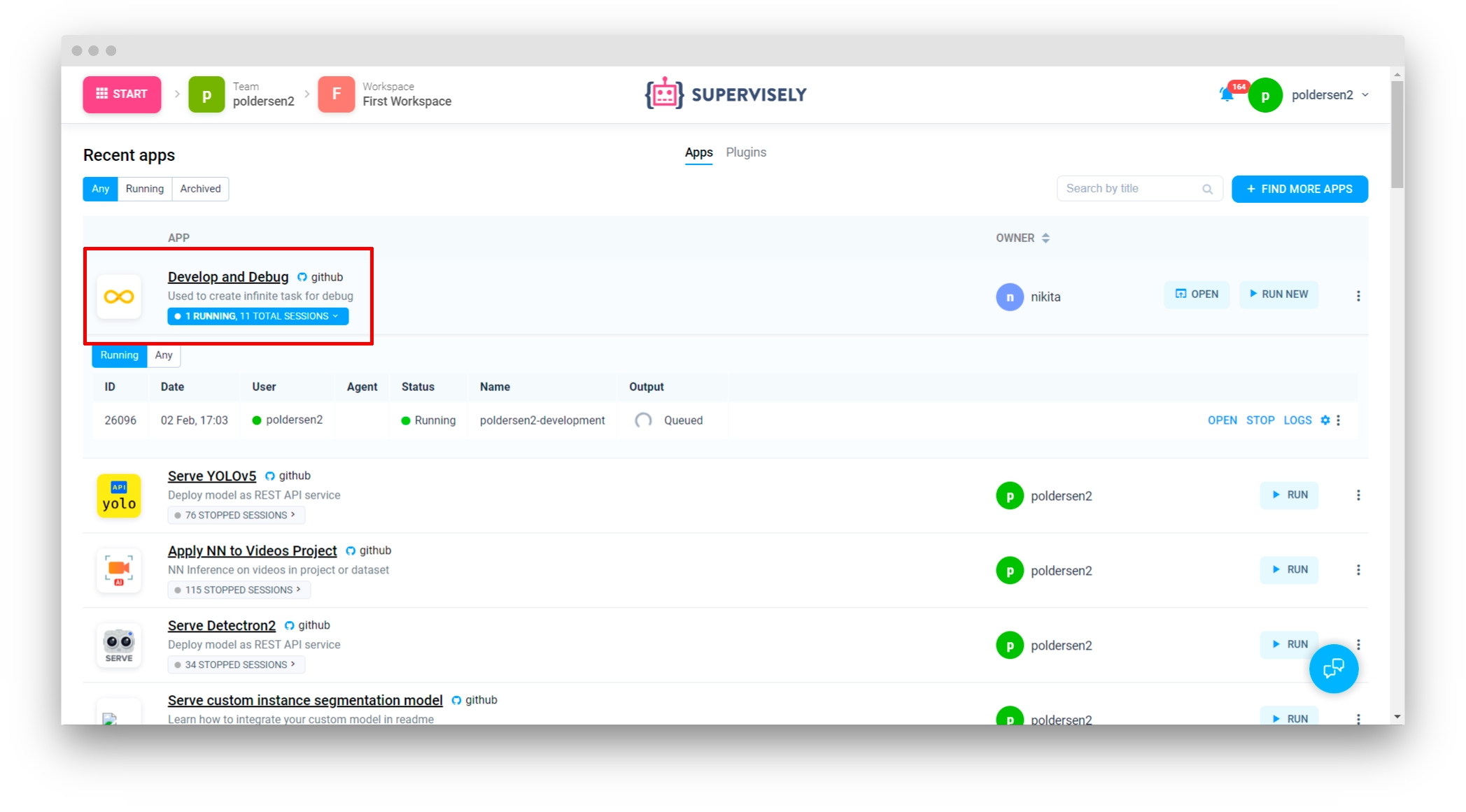
✅ It will deploy the model in the Supervisely platform as a regular serving App that is able to communicate with all other apps in the platform:
Once you've tested the code, it's time to release it into the platform. It can be released as an App that is shared with the all Supervisely community, or as your own private App.
Explanation:
supervisely/serve/src/main.py - main inference script
supervisely/serve/src/sly_functions.py - functions to run the PIPs model based on the original repository code
reference_model - directory with model weights; will be created automatically in get_reference_model.sh
demo_images - directory with demo frames for inference
supervisely/serve/README.md - readme of your application, it is the main page of an application in Ecosystem with some images, videos, and how-to-use guides
supervisely/serve/config.json - configuration of the Supervisely application, which defines the name and description of the app, its context menu, icon, poster, and running settings
requirements.txt - all packages needed for debugging
local.env - file with variables used for debugging
supervisely/serve/docker - directory with the custom Dockerfile for this application and the script that builds it and publishes it to the docker registry
Here is the explanation for the fields:
type - type of the module in Supervisely Ecosystem
version - version of Supervisely App Engine. Just keep it by default
name - the name of the application
description - the description of the application
categories - these tags are used to place the application in the correct category in Ecosystem.
session_tags - these tags will be assigned to every running session of the application. They can be used by other apps to find and filter all running sessions
"need_gpu": true - should be true if you want to use any cuda devices.
"community_agent": false - this means that this app can not be run on the agents started by Supervisely team, so users have to connect their own computers and run the app only on their own agents. Only applicable in Community Edition. Enterprise customers use their private instances so they can ignore the current option
docker_image - Docker container will be started from the defined Docker image, github repository will be downloaded and mounted inside the container.
entrypoint - the command that starts our application in a container
port - port inside the container
"headless": true means that the app has no User Interface
allowed_shapes - shapes can be tracked with this model. Сonversion of figures to a set of points and vice versa is implemented in the base class, so you can keep this field default.
Step 1. Prepare ~/supervisely.env file with credentials.
Step 2. Create and install supervisely==6.72.11 in it.
Step 1. Prepare ~/supervisely.env file with credentials.
Step 2. Clone with source code and create .
In the code below a custom_inference_settings is used. It allows us to provide custom settings that could be used in predict() (See more in )
Now you can use apps like , with your deployed model.
Or get the model inference via Python API with the help of sly.nn.inference.Session class just in one line of code. See .
Refer to for all releasing details. For a private app check also .
The structure of is the following:
App configuration is stored in config.json file. A detailed explanation of all possible fields is covered in this . Let's check the config for our current app: